Description
AXIS#.OBS.KO sets the model gain of the velocity Observer.
This value represents the gain of the electro-mechanical plant of the system. The system has a high gain if it responds quickly and agilely, and this number will be high. For a heavily loaded system with a large inertia mismatch, the system does not respond quickly and is sluggish. This means the value of OBS.KO will be lower.
-
- It becomes important that OBS.KO is set correctly to ensure stability as the Observer's bandwidth (AXIS#.OBS.BW) is set lower.
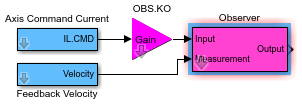
The Observer is made up of a few components. Following is a block diagram of how the Observer is connected in the loops.
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-04-03-000 |
General Information
|
Type |
Read/Write |
|
Units |
(rad/sec2)/A |
|
Range |
0 to 1,000,000.000 |
|
Default Value |
0 |
|
Data Type |
Float |
|
Stored in Non-Volatile Memory |
Yes |
Variants Supported
All variants are supported.
Fieldbus Information
|
Command |
Index |
SubIndex |
Data Type |
Units |
Float Scale |
Access |
PDO Mappable |
|---|---|---|---|---|---|---|---|
|
AXIS1.OBS.KO |
5017h |
03h |
Unsigned32 |
- |
1000:1 |
Read/Write |
No |
|
AXIS2.OBS.KO |
5117h |
03h |
Unsigned32 |
- |
1000:1 |
Read/Write |
No |






